本次实验实现了下面的module
| 模型名称 | 测试准确率 | 测试f值 |
|---|---|---|
| CNN_simple | 83.46% | 0.8322 |
| CNN_complex | 81.75% | 0.8167 |
| RNN | 82.54% | 0.8247 |
| DenseNet | 75.95% | 0.7546 |
| ResNet | 77.43% | 0.7725 |
| LSTM | 80.21% | 0.8010 |
| BiLSTM | 81.68% | 0.8158 |
| GoogLeNet | 74.40% | 0.7367 |
| MLP | 70.94% | 0.7047 |
| MLP_with_Dropout | 74.82% | 0.7464 |
0.实验流程
文件结构图
1 | D:. |
执行过程
一.数据预处理:DataProcesser()类
-
构建词表vocab:
- 取得词频表,保留出现频率高于treshold(我取了10,一共获得8072个词)的词
- 为词频表中的词建立索引
- 对于词频表中每一个词,利用提供的转换文件,转换为50维词向量(如果转换表中没有这个词,我的做法是随机一个,实际上由于我们只保留了一定出现频率的词,没有出现过的词占比很少,对结果影响不大)
-
读取句子:
- 读取句子,记录label与commet
- 通过索引,将comment从词列表转化为索引列表(如果没有索引,转换成pad_char对应的id,这里把中性词"把"作为pad_char)
- 统一句子长度:
- 通过统计手段,97.5%的评论次数在96个词以内,统一句子长度为96(当然也可以是别的长度)
- 超过96的句子则截断
- 低于96的句子,我的操作是重复这个句子直到长度为96.(另一种方法是填充pad_id,但是要注意不要训练pad_id)
-
转换为词向量
- 在构建词表时已经完成了索引,根据词的索引找到词向量即可.
DataProcesser使用方法,执行该类示例的run方法即可.最终生成了input文件夹下转换成词向量列表的句子.(分别有训练集,测试集,验证集,和word2vec的索引)
二.获得模型GetModule()类
module.py文件中定义了GetModule()类,它会调用参数module_name对应的模型,并用我调整过的参数初始化这个模型,对于某些模型起到adapter的作用,对输入加以处理,使得可以在主函数中使用统一的输入模式而不加以修改.可以在module.py文件中方便地注册更多的模型
三.主函数DLongpu.py
主要是定义了PredictClass()
-
通过上述GetModule()初始化自己的模型(包括了对应的损失函数和优化器)
-
读取预处理的数据,并通过pytorch的Dataset和Dataloader准备好数据
-
开始训练epoch次数
- 分batch训练:将训练数据随机划分为多个batch,每个batch被输入到模型中进行训练。(Dataloader的功能)
- 正向传播:将当前batch的数据输入到模型中,进行正向传播计算得到输出结果。
- 计算loss:根据输出结果和标签,计算模型的损失函数(loss)。
- 反向传播:根据损失函数,使用链式法则计算每个参数的梯度,然后传回模型中更新参数,以减小损失函数。
- 重复迭代:重复以上步骤直到所有batch都被训练过一遍,一个epoch训练结束。
- 训练结束后开启eval模式,利用验证集对效果进行验证
-
训练结束后展示在测试集的效果
-
储存模型
实际上,可以通过main函数中的Mode标签,切换成test模式,读取已经储存的模型.
此外,还可使用PredictClass()中的real_test方法,利用了jieba分词对用户真实的输入进行预测.经过我的实验,效果还挺不错的.

效果还是不错的
1.模型的结构图
下面分别介绍模型的结构图
-
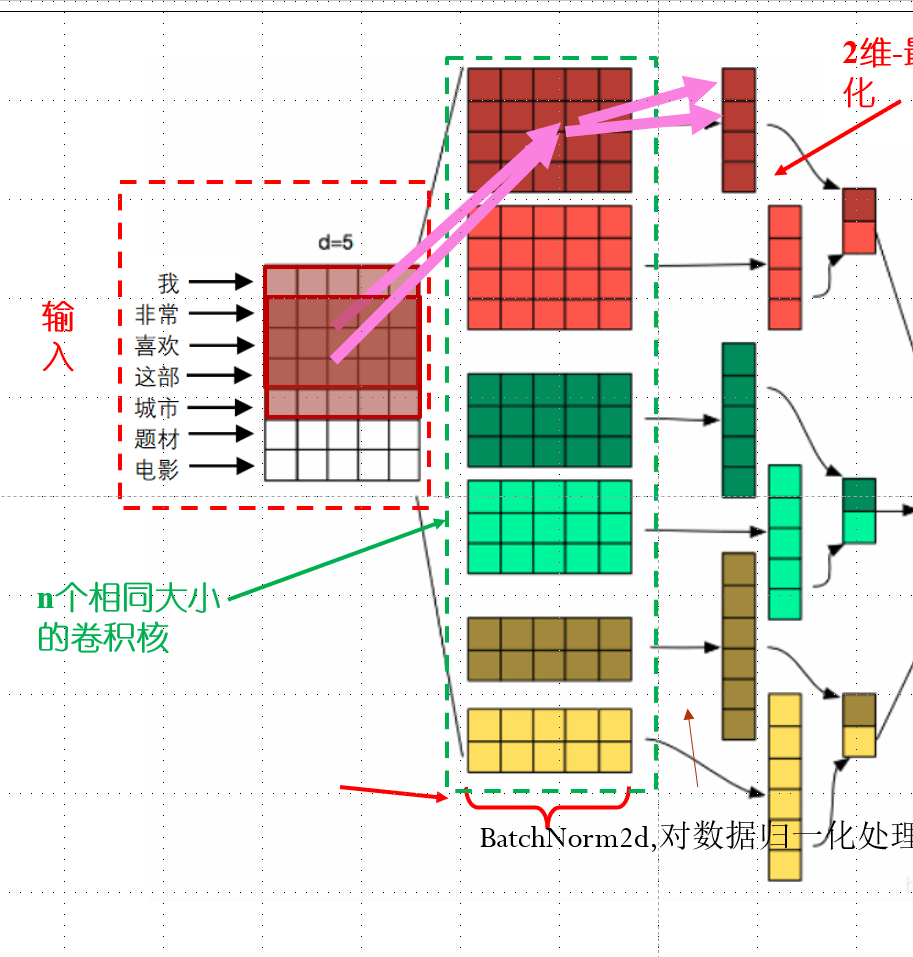
CNN_simple
graph TB A(batch_X) -->|Conv2d| C(Batch,通道数=卷积核数目,) C -->|BatchNorm2d| D(Batch,对每一通道数据归一化处理) D -->|ReLU,MaxPool2d|F(Batch, kernel_num, 1, 1) F -->|View| G(Batch, kernel_num将输出拼接起来) G -->|Dropout| H(Batch, kernel_num) H -->|Linear and Softmax| I(全连接,将输出长度变为2,并对输出softmax)
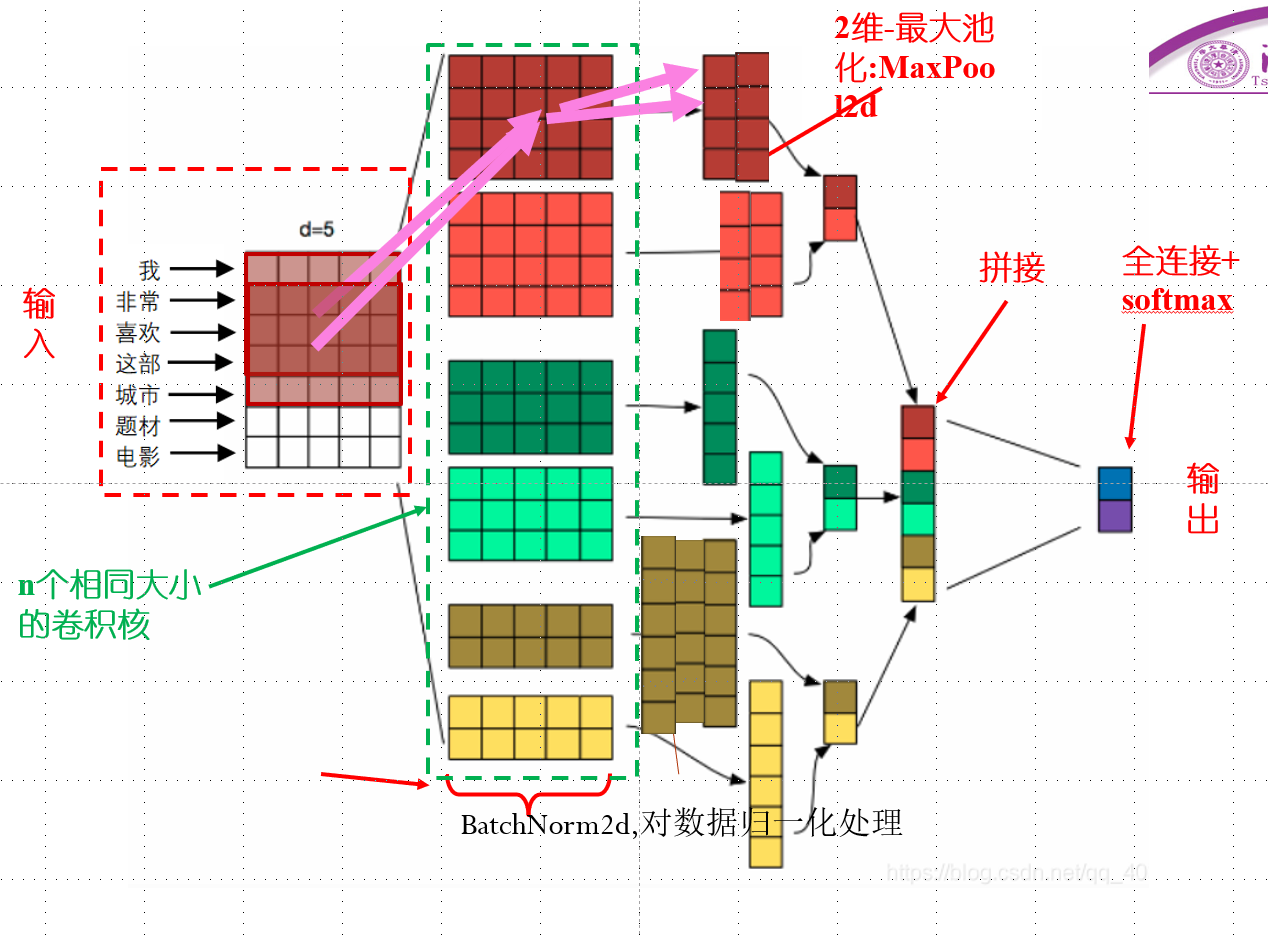
注意我和课本不同的是我使用了n个相同大小卷积核,在池化的时候由于卷积后仍是2维,所以是二维的最大池化(图源课件ppt,稍作修改)
CNN_complex
使用了ppt中原始cnn模型前半部分作为一个模块cnn_net
graph LR
A(batch_X) -->C(cnn_net1)-->E(flattern)-->G(maxpool1D)-->I(view拼接)
A-->B(cnn_net2)-->F(flattern)-->H(maxpool1D)-->I-->Z(全连接+softmax)
-
将两个形状是(批量大小, 词数, 词向量维度)的嵌入层的输出按词向量连结
-
根据Conv1D要求的输入格式,将词向量维,即一维卷积层的通道维(即词向量那一维),变换到前一维
-
对于每个一维卷积层,在时序最大池化后会得到一个形状为(批量大小, 通道大小, 1)的 Tensor。
-
拼接在一起后通过全连接层得到输出
RNN(我的实现也就是单层的LSTM)
graph LR input[Input] --> encoder[LSTM layer] encoder --> output[Output] encoder --> concatenation[Concatenation] concatenation --> decoder[Linear layer] decoder --> result[Result]
具体结构解释:
-
输入:输入数据,形状为 $batch \times seq_length \times embed_size$
-
LSTM layer:包含多层LSTM的编码器,将输入数据序列传入编码器后,得到输出序列和最终时间步的隐藏状态 -
-
输出:输出序列 $output_seq$,形状为 $seq_length \times batch \times num_hiddens$
-
Concatenation:将最终时间步的隐藏状态 $h$ 和初始时间步的隐藏状态 $c$ 沿最后一个维度拼接起来,形状为 $batch \times 2*num_hiddens$
-
Linear layer:线性层,将拼接后的向量输入,输出一个二元向量
-
Result:模型的输出,输出层的结果,形状为 $batch \times 2$
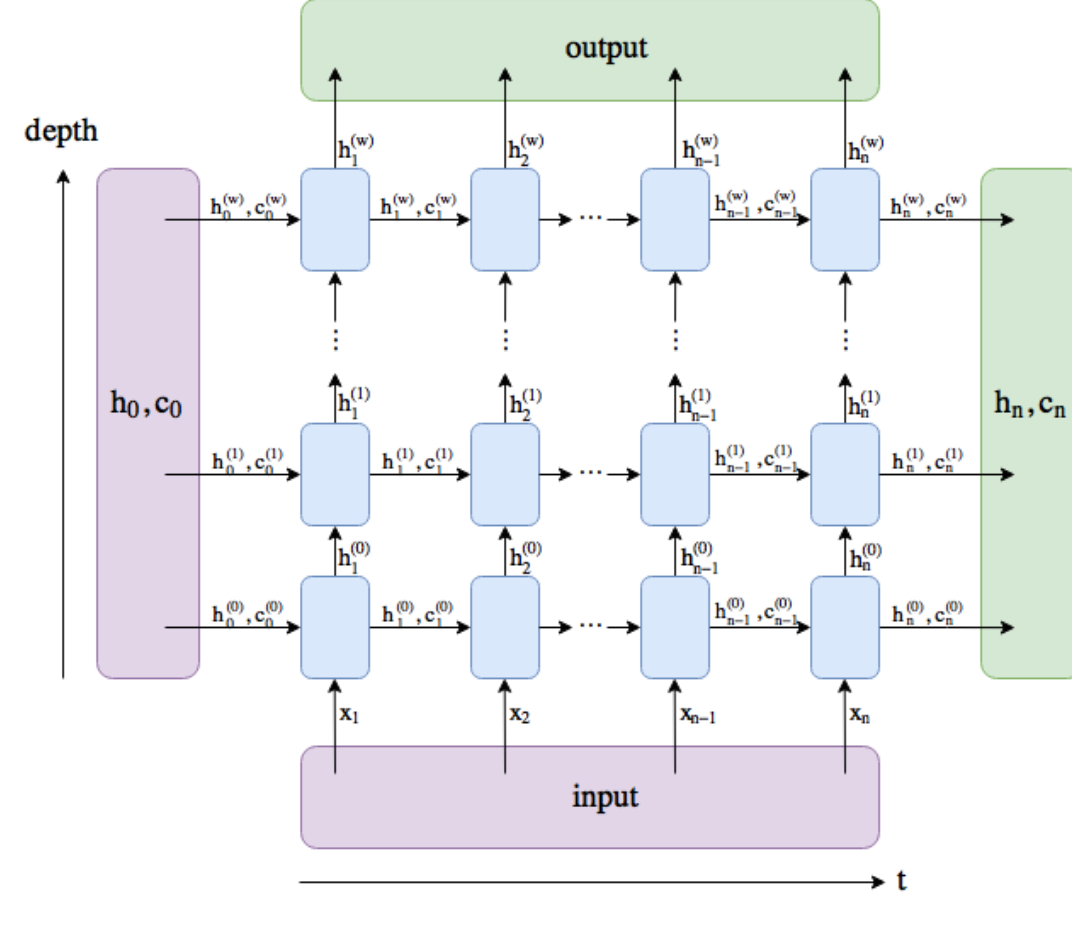
其中depth为1,如果在torch中设置bidirectional==true,可以得到双向RNN
MLP
很多层的全连接+激活函数.
激活函数是必要的,否则多层会退化为单层
GoogLeNet
主要是inception模块
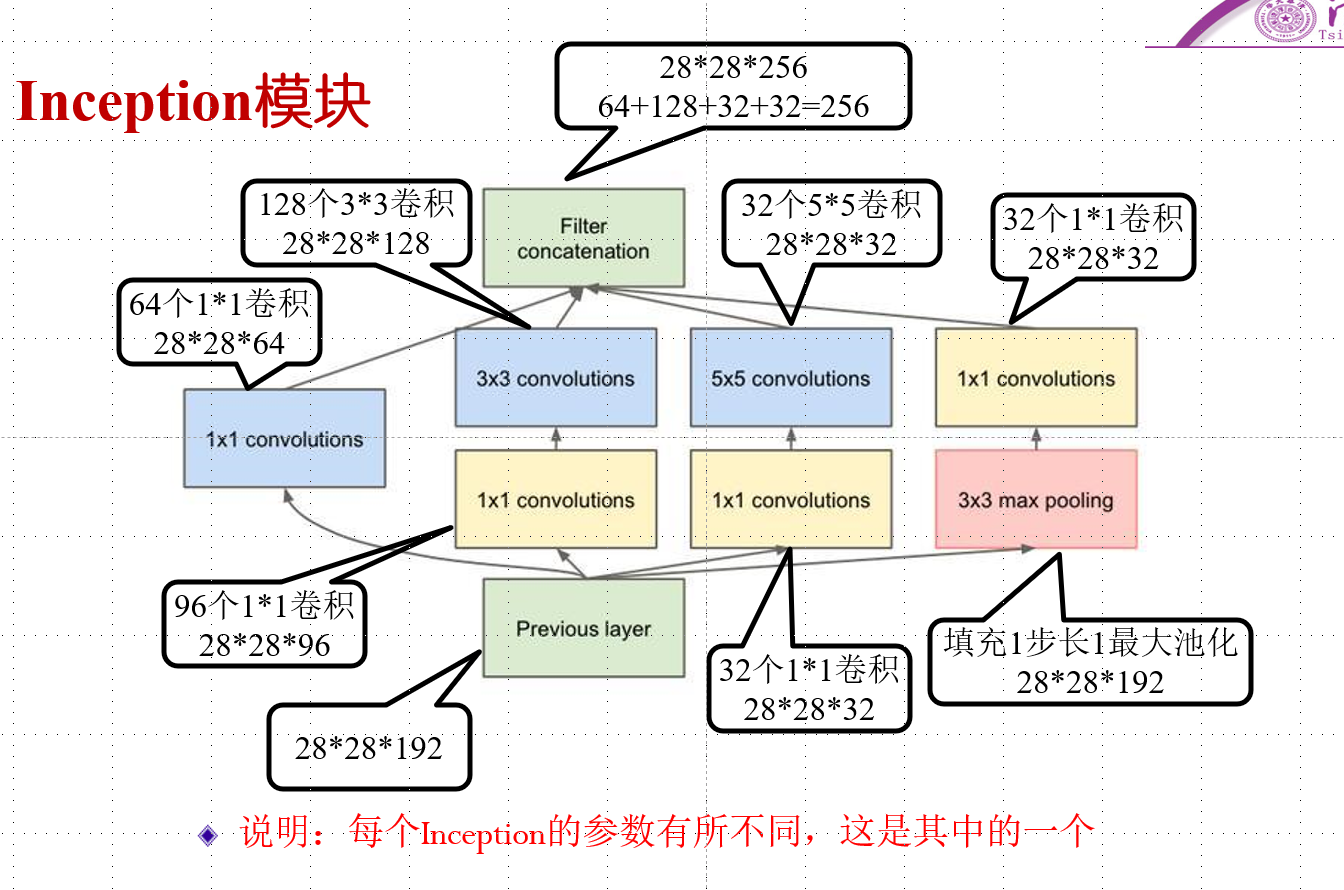
串联多个inception模块,最后池化+全连接
DenseNet\ResNet等不再画出,完全参照ppt
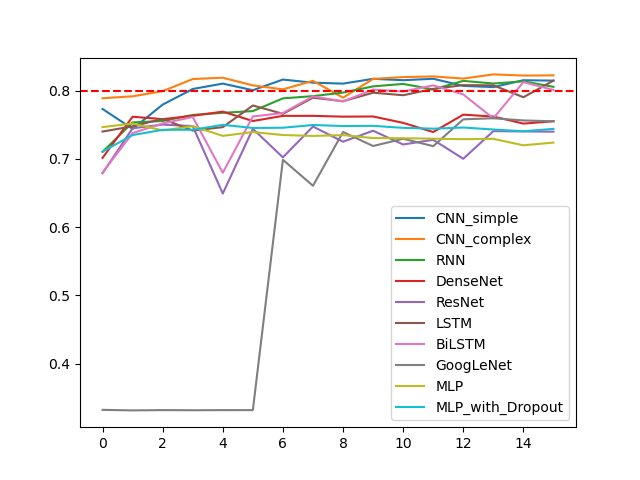
2.实验结果
-
所有模型最终在测试集上表现的结果.
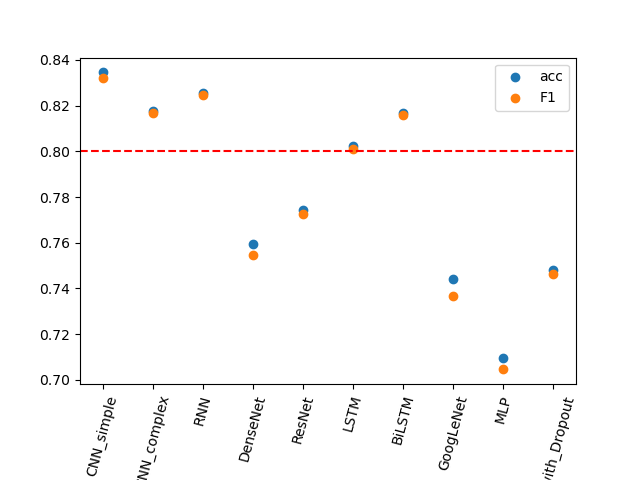
可以看见CNN,RNN都达到了f值高于0.8的要求
-
所有模型训练准确率随epoch的变化
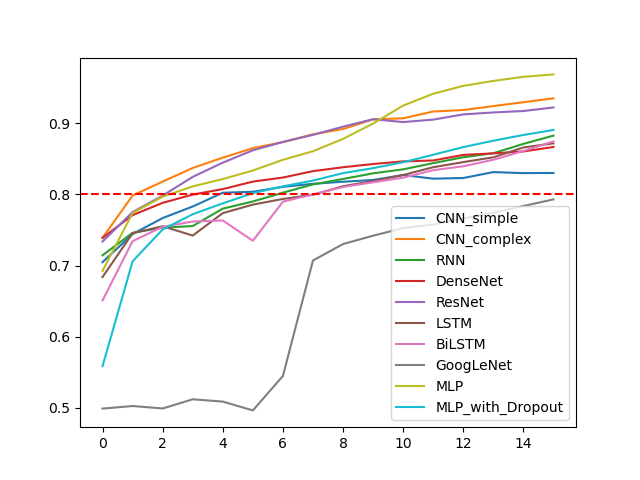
-
所有模型训练f值随epoch的变化
本题给的数据中正负标签的比例差不多,而且我的模型看上去对正负完全不敏感.所以最终f值的计算结果和准确率差别不大.
-
所有模型训练f值随epoch的变化
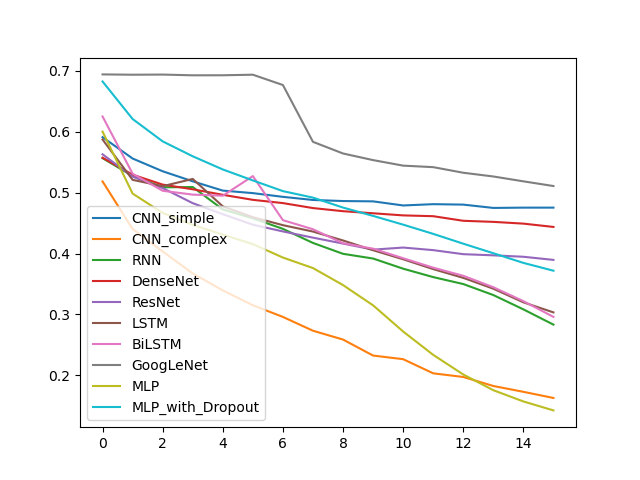
处于对计算力和时间的综合考虑,还有对我可怜的1650的保护,我选取的epoch比较小(16)可以看见各种模型的loss值仍有下降趋势,在对单个模型的测试过程中,增加epoch数确实可能增加训练准确率,减小loss.但有的模型已经出现比较明显的过拟合现象
-
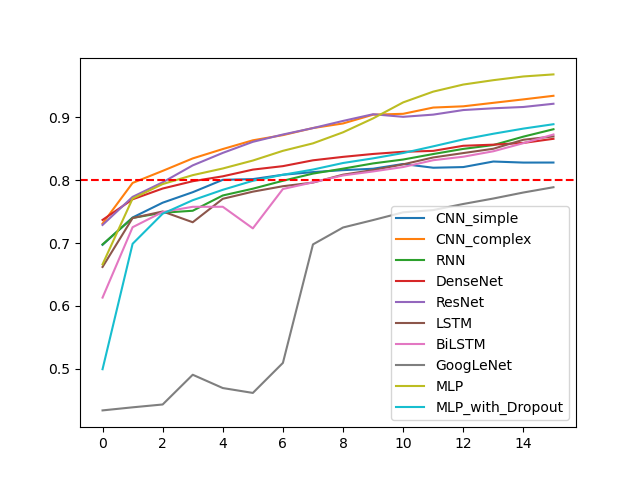
所有模型验证准确率随epoch的变化
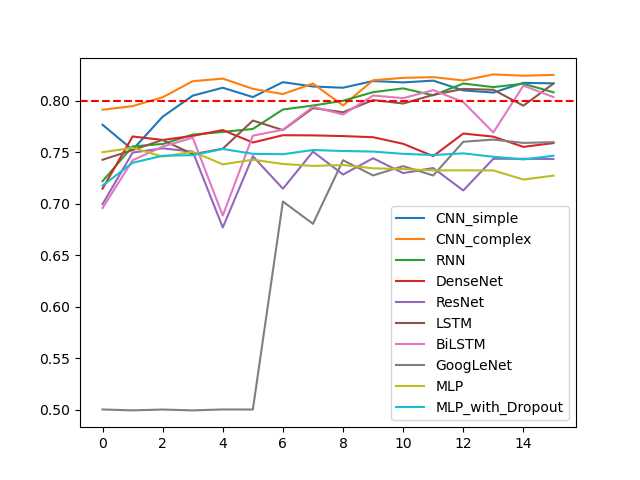
-
所有模型验证准确率随epoch的变化
明显地,在验证集上,随epoch增加,准确率并不一定增加,甚至不升反降
3.使用的不同参数效果,并分析原因
主要的参数
-
epoch:太低达不到效果,太高出现过拟合
-
learrning-rate:太高波动太大,表现为准确率根本不能提升。设太低学习太慢,训练需epoch轮数多
-
Dropout:Dropout是指在模型训练时,随机将一部分神经元输出设置为0,从而防止模型过拟合的一种技术。在PyTorch中,我们可以通过调整Dropout概率来控制每个神经元输出为0的概率。Dropout概率过低可能会导致过拟合,而概率过高则可能会影响模型的表现。
-
Batch Size:指每次模型训练时参与训练的样本数量。如果Batch Size设置过小,可能会出现训练时间过长的问题;而如果Batch Size过大,可能会出现内存不足的问题。
-
kernel_nums:对于我表现最好的cnn-simple。我的卷积核数目增加(100–>256),准确率提升较明显
4.不同模型之间的简要比较
-
在我对每个模型分别进行测试时,达到最高效果的实际上是CNN-complex模型
-
我实现的CNN,RNN模型确实在测试时表现比Baseline模型(MLP模型)强
-
但是MLP模型在训练集上的表现非常好,很快到达了95%+
-
认为MLP模型太容易过拟合,因此给他加上几个dropout,确实有点用,在测试集上表现略有变好
-
在我没有实现MLP的时候,实验表明我DenseNet,GoogleNet等几个复杂模型过拟合程度比较高
-
但是最简单的MLP的训练与测试表现差异反而最大.
5.问题思考
-
实验训练什么时候停止是最合适的?
Early Stop:理论上讲可以通过验证集动态调整停止时间,在验证集效果达到最好时就停止训练.操作上可以在验证集几轮epoch都没有增长时停止.
但是earlystop有几个问题:
-
比较复杂,不方便我实验框架下统一的实现.
-
有时候模型准确率会突变,比如googleNet
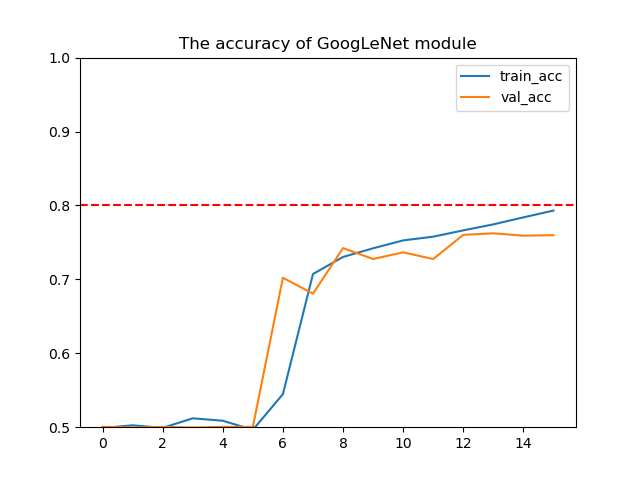
所以我最终采用了固定epoch数的方式.
但是实际上几个我调过参数模型在epoch数为40左右表现最好
-
-
实验参数的初始化是怎么做的?
-
模型的参数基本上是pytorch默认方法.
-
例如:nn.Linear 和 nn.Conv2D,都是在 [-limit, limit] 之间的均匀分布(Uniform distribution),其中 limit 是 $1. / sqrt(fan_{in}) ,fan_{in}$ 是指参数张量(tensor)的输入单元的数量。
-
此外对于RNN可以考虑正交初始化(Orthogonal Initialization)
主要用以解决深度网络下的梯度消失、梯度爆炸问题,是在RNN中经常使用的参数初始化方法。
nn.init.orthogonal但实际上差别没有感觉
-
-
有什么方法可以方式训练过程陷入过拟合。
下面是按照我实验中的效果明显程度排序
-
选取更加合适的模型:
这个是
-
调整epoch,在合理时机停止
-
增加dropout层,调整dropout概率
看baseline模型,认为MLP模型太容易过拟合,因此给他加上几个dropout,确实有点用,在测试集上表现确实略有变好.但是对其他比较复杂的模型来说,dropout影响有限
-
参数正则化
计算loss时添加正则化项
1
2
3
4
5
L1_reg = 0
for param in self.module.parameters():
L1_reg += torch.sum(torch.abs(param))
loss += 0.001 * L1_reg # lambda=0.001这样可以惩罚某些较大的参数.按照我的理解就是防止考试偏科.
但实在是没什么用
-
调整参数.
dropout\learning-rate等等都会影响过拟合
-
增加训练集大小
一个操作是可以通过k-折,将原有训练集与验证集合并后随机分成k份.这样可以增加训练集大小
-
动态停止epoch
-
动态调整
6.试分析CNN,RNN,全连接神经网络(MLP)三者的优缺点。
-
多层感知机在单层神经网络的基础上引入了一到多个隐藏层(hidden layer)。隐藏层位于输入层和输出层之间。
如果把CNN的核的大小看成和输入一样,那么实际上MLP可以看作是CNN的一个特例.
-
MLP
- 全连接神经网络(MLP)的优点在于比较简单,它可以捕捉到输入数据的非线性关系,能够应用于各种领域。
- 参数较多,单层计算起来比较复杂,容易过拟合…正则化等技术在MLP上的效果比较好
- 单层只能表示一个维度的信息.对空间的敏感性不如CNN
-
RNN
-
对于序列数据的处理具有很强的能力,尤其在语音识别、自然语言处理和语音合成等任务中表现优异。
-
RNN具有记忆能力,它可以传递信息并保留之前输入的状态,从而在处理时序信息时取得较好的效果。
-
RNN的缺点在于,训练复杂度高,而且受梯度消失/爆炸问题的限制,其在长序列的语音和自然语言任务中表现可能较差。
-
-
CNN
- 单层计算量比全连接小
- 参数共享和稀疏交通,能够以较小的计算和储存成本生成大量参数。
- 可以捕捉到多个层级的特征,比如宽高.对空间敏感性更好,因此常常应用在计算机视觉中
- 但是CNN还是有两个非常危险的缺陷:平移不变性和池化层。我的理解是CNN对位置太敏感了,一个卷积核的神经元识别一只猫,猫动一动就认不出来了.池化层虽然可以一定程度上削弱这个问题,但是带来了数据信息丢失等新问题.